|
My Project
|
|
My Project
|
#include <AntennaMaster.h>
Public Member Functions | |
| AntennaMaster (std::string host, bool simPmac=false, bool simGpib=false, bool simDlp=false, bool priv=true, bool simLna=false, bool simAdc=false, bool simRoach1=false, bool simRoach2=false) | |
| ~AntennaMaster () | |
| gcp::antenna::control::AntennaControl * | AntennaControl () |
| gcp::antenna::control::AntennaDrive * | AntennaDrive () |
| gcp::antenna::control::AntennaMonitor * | AntennaMonitor () |
| gcp::antenna::control::AntennaRx * | AntennaRx () |
| gcp::antenna::control::AntennaRoach * | AntennaRoach () |
| void | restartServices () |
| SIGNALTASK_HANDLER_FN (doNothing) | |
| void | sendDriveShutDownMessage () |
| void | sendAdoptBoardMsg (unsigned short, AntennaTask::Id taskId) |
| SpecificShare * | getShare () |
| gcp::util::AntNum * | getAnt () |
| std::string | host () |
| bool | usePrio () |
| bool | simPmac () |
| bool | simGpib () |
| bool | simLna () |
| bool | simAdc () |
| bool | simDlp () |
| bool | simRoach1 () |
| bool | simRoach2 () |
 Public Member Functions inherited from gcp::antenna::control::SpecificTask Public Member Functions inherited from gcp::antenna::control::SpecificTask | |
| SpecificTask () | |
| virtual | ~SpecificTask () |
| SpecificShare * | getShare () |
| Public Member Functions inherited from gcp::util::GenericMasterTask< AntennaMasterMsg > | |
| GenericMasterTask () | |
| virtual | ~GenericMasterTask () |
| Public Member Functions inherited from gcp::util::GenericTask< AntennaMasterMsg > | |
| void | sendRestartMsg () |
| void | sendStopMsg () |
| void | sendHeartBeatMsg () |
| virtual void | fwdTaskMsg (AntennaMasterMsg *msg) |
Static Public Member Functions | |
| static | SIGNALTASK_HANDLER_FN (sendSendHeartBeatMsg) |
| static | SIGNALTASK_HANDLER_FN (sendShutDownMsg) |
| static | SIGNALTASK_HANDLER_FN (sendPackDataFrameMsg) |
| static | SIGNALTASK_HANDLER_FN (sendDriveTickMsg) |
| static | SIGNALTASK_HANDLER_FN (sendDriveReadMsg) |
| static | SIGNALTASK_HANDLER_FN (sendDlpTempRequestMsg) |
| static | SIGNALTASK_HANDLER_FN (sendConnectControlMsg) |
| static | SIGNALTASK_HANDLER_FN (sendConnectDriveMsg) |
| static | SIGNALTASK_HANDLER_FN (sendConnectScannerMsg) |
| static | SIGNALTASK_HANDLER_FN (sendReadoutGpibMsg) |
| static | SIGNALTASK_HANDLER_FN (sendConnectRxMsg) |
| static | SIGNALTASK_HANDLER_FN (sendConnectRoachMsg) |
| static | SIGNALTASK_HANDLER_FN (sendDisconnectRxMsg) |
| static | SIGNALTASK_HANDLER_FN (sendDisconnectRoachMsg) |
| static | SIGNALTASK_HANDLER_FN (sendReadoutRoachMsg) |
| static | SIGNALTASK_HANDLER_FN (sendWriteRoachMsg) |
| static | SIGNALTASK_HANDLER_FN (sendReadoutRxMsg) |
| static | SIGNALTASK_HANDLER_FN (sendWriteRxMsg) |
| static | SIGNALTASK_HANDLER_FN (sendReadLnaMsg) |
| static | SIGNALTASK_HANDLER_FN (sendReadAdcMsg) |
| static | ANTENNAMASTER_TASK_FWD_FN (forwardMasterMsg) |
Additional Inherited Members | |
| Public Attributes inherited from gcp::antenna::control::SpecificTask | |
| SpecificShare * | share_ |
| Protected Member Functions inherited from gcp::util::GenericMasterTask< AntennaMasterMsg > | |
| void | processTaskMsg (bool *stop) |
| void | sendInstallTimerMsg (std::string name, int sigNo, unsigned long intervalSec, unsigned long intervalNsec, SIGNALTASK_HANDLER_FN(*handler)) |
| void | sendInstallTimerMsg (std::string name, int sigNo, unsigned long initSec, unsigned long initNsec, unsigned long intervalSec, unsigned long intervalNsec, SIGNALTASK_HANDLER_FN(*handler)) |
| void | installTimer (AntennaMasterMsg *msg) |
| void | sendInstallSignalMsg (int sigNo, SIGNALTASK_HANDLER_FN(*handler)) |
| void | installSignal (AntennaMasterMsg *msg) |
| void | sendEnableTimerMsg (std::string name, bool enable) |
| void | enableTimer (AntennaMasterMsg *msg) |
| void | sendAddHandlerMsg (std::string name, SIGNALTASK_HANDLER_FN(*handler), bool add) |
| void | addHandler (AntennaMasterMsg *msg) |
| Protected Member Functions inherited from gcp::util::GenericTask< AntennaMasterMsg > | |
| GenericTask () | |
| GenericTask (Thread *thread) | |
| virtual | ~GenericTask () |
| void | sendTaskMsg (AntennaMasterMsg *msg) |
| void | startThreads (void *arg) |
| void | startThread (void *arg, unsigned order) |
| unsigned | getMinStartOrder () |
| bool | threadsNeedStarting () |
| void | cancelThreads () |
| void | cancelThread (unsigned order) |
| unsigned | getMinCancelOrder () |
| bool | threadsNeedCancelling () |
| void | pingThreads (void *arg) |
| void | raise (std::string name, int sigNo) |
| Thread * | getThread (std::string name) |
| bool | threadsAreRunning () |
| void | shutdownConnection (int fd) |
| virtual void | serviceMsgQ (void) |
| virtual void | restart (void) |
| virtual void | run (void) |
| virtual void | processMsg (AntennaMasterMsg *msg) |
| virtual void | respondToHeartBeat () |
| void | stepCommands () |
| Protected Attributes inherited from gcp::util::GenericMasterTask< AntennaMasterMsg > | |
| gcp::util::SignalTask * | signal_ |
| Protected Attributes inherited from gcp::util::GenericTask< AntennaMasterMsg > | |
| Thread * | thread_ |
| std::vector< Thread * > | threads_ |
| PipeQ< AntennaMasterMsg > | msgq_ |
| gcp::util::FdSet | fdSet_ |
| std::vector< Command * > | commands_ |
| struct timeval * | timeOut_ |
| TimeVal | commandTimeOut_ |
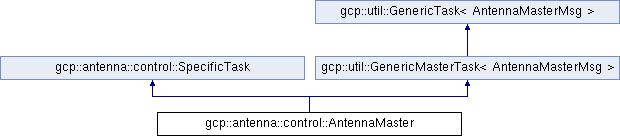
Define a class to encapsulate the entire Antenna control system. Instantiating this object will spawn all subsystem threads of the Antenna control system, which currently include a receiver task, a drive system task and a monitoring task.
| AntennaMaster::AntennaMaster | ( | std::string | host, |
| bool | simPmac = false, |
||
| bool | simGpib = false, |
||
| bool | simDlp = false, |
||
| bool | priv = true, |
||
| bool | simLna = false, |
||
| bool | simAdc = false, |
||
| bool | simRoach1 = false, |
||
| bool | simRoach2 = false |
||
| ) |
Constructor
| Exception; | ....................................................................... Constructor method. This should start up all subsystem threads |
Input:
host string The name of the host we are running on. simDrive bool true if ACU should be simulated
| AntennaMaster::~AntennaMaster | ( | ) |
Destructor
| Exception | ....................................................................... AntennaMaster destructor method. This should cause all subsystem threads to shut down. |
| AntennaControl * AntennaMaster::AntennaControl | ( | ) |
Return a pointer to the Control task resources
....................................................................... Accessor method for the AntennaControl subsystem
| AntennaDrive * AntennaMaster::AntennaDrive | ( | ) |
Return a pointer to the Drive control task resources
....................................................................... AntennaDrive subsystem accessor
|
static |
Public method by which other tasks can forward message to us.
| AntennaMonitor * AntennaMaster::AntennaMonitor | ( | ) |
Return a pointer to the Monitor task resources
....................................................................... Accessor method for AntennaMonitor subsystem
| AntennaRoach * AntennaMaster::AntennaRoach | ( | ) |
Return a pointer to the Receiver task resources
....................................................................... Accessor method for the AntennaRoach subsystem
| AntennaRx * AntennaMaster::AntennaRx | ( | ) |
Return a pointer to the Receiver task resources
....................................................................... Accessor method for the AntennaRx subsystem
| AntNum * AntennaMaster::getAnt | ( | ) |
Public method to get a reference to our antenna enumerator.
....................................................................... Public method to get access to our antenna enumerator.
| SpecificShare * AntennaMaster::getShare | ( | ) |
Public method to get a reference to our shared resource object.
....................................................................... Public method to get access to our shared resource object
|
inline |
A copy of the host to which we will attach
| void AntennaMaster::restartServices | ( | ) |
Public interface to startThreads()
| Exception |
....................................................................... Restart subsystem threads
| void gcp::antenna::control::AntennaMaster::sendAdoptBoardMsg | ( | unsigned | short, |
| AntennaTask::Id | taskId | ||
| ) |
Method by which other tasks can ask us for control of boards.
| void AntennaMaster::sendDriveShutDownMessage | ( | ) |
Send message to drive telling it to shut down ACU interface
| gcp::antenna::control::AntennaMaster::SIGNALTASK_HANDLER_FN | ( | doNothing | ) |
A no-op signal handler for signals we wish to explicitly disable.
|
static |
Send a message to the AntennaMaster to tell it to send out a heartbeat request to all subordinate threads.
| Exception | (via MsgQ::sendMsg) |
|
static |
Send a message to the AntennaMaster to tell it to shut down
| Exception | (via MsgQ::sendMsg) |
|
static |
Send a message to the monitor task that it's time to pack a data frame for transmission back to the ACC.
|
static |
Tell the Tracker task that the 1-second servo command pulse has arrived.
|
static |
Tell the Tracker task that the 1-second servo read pulse has arrived.
|
static |
Read those damn Dlp temp sensors
|
static |
Tell the Control task to attempt to connect to the host.
|
static |
Tell the Tracker to attempt to connect to the servo
|
static |
Tell the Control task to attempt to connect to the host.
|
static |
Tell the Receiver task to attempt to connect to the host.
|
static |
Tell the Receiver task to attempt to connect to the host.
|
static |
Tell the Receiver task to disconnect from the host
|
static |
Tell the Receiver task to disconnect from the host
| bool AntennaMaster::usePrio | ( | ) |
A copy of the boolean flag specifying whether or not to use thread prioritizing
 1.8.6
1.8.6 
